Multilayer Feedforward Neural Network
A Multilayer Feedforward Neural Network is a feedforward neural network that is a multi-layer neural network.
- AKA: Multi-Layer Perceptron Network, MLPN, Multi-Layer Perceptron, MLP.
- Context:
- It can be trained by a Multi-layer Feed-Forward Neural Network Training System (that implements a multilayer feedforward neural network training algorithm).
- It can range from being a One Hidden-Layer Feed-Forward Neural Network to being a Many Hidden-Layer Feed-Forward Neural Network.
- It can range from being a Trained Multilayer Feed-Forward Neural Network to being an Untrained Multilayer Feed-Forward Neural Network.
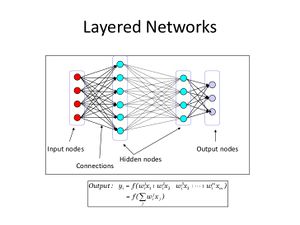
- It can be represented visually as


- Example(s):
- Counter-Example(s):
- See: Artificial Neural Network, Activation Function, Supervised Learning, Backpropagation, Perceptron, Linear Separability, Mathematics of Control, Signals, And Systems, Recurrent Neural Network.

References
2017a
- (Wikipedia, 2017) ⇒ https://en.wikipedia.org/wiki/Multilayer_perceptron Retrieved:2017-12-3.
- A multilayer perceptron (MLP) is a class of feedforward artificial neural network. An MLP consists of at least three layers of nodes. Except for the input nodes, each node is a neuron that uses a nonlinear activation function. MLP utilizes a supervised learning technique called backpropagation for training. [1] [2] Its multiple layers and non-linear activation distinguish MLP from a linear perceptron. It can distinguish data that is not linearly separable.[3] Multilayer perceptrons are sometimes colloquially referred to as "vanilla" neural networks, especially when they have a single hidden layer. [4]
2017b
- (Wikipedia, 2017) ⇒ https://en.wikipedia.org/wiki/Feedforward_neural_network#Multi-layer_perceptron Retrieved:2017-12-3.
- This class of networks consists of multiple layers of computational units, usually interconnected in a feed-forward way. Each neuron in one layer has directed connections to the neurons of the subsequent layer. In many applications the units of these networks apply a sigmoid function as an activation function.
The universal approximation theorem for neural networks states that every continuous function that maps intervals of real numbers to some output interval of real numbers can be approximated arbitrarily closely by a multi-layer perceptron with just one hidden layer. This result holds for a wide range of activation functions, e.g. for the sigmoidal functions.
Multi-layer networks use a variety of learning techniques, the most popular being back-propagation. Here, the output values are compared with the correct answer to compute the value of some predefined error-function. By various techniques, the error is then fed back through the network. Using this information, the algorithm adjusts the weights of each connection in order to reduce the value of the error function by some small amount. After repeating this process for a sufficiently large number of training cycles, the network will usually converge to some state where the error of the calculations is small. In this case, one would say that the network has learned a certain target function. To adjust weights properly, one applies a general method for non-linear optimization that is called gradient descent. For this, the network calculates the derivative of the error function with respect to the network weights, and changes the weights such that the error decreases (thus going downhill on the surface of the error function). For this reason, back-propagation can only be applied on networks with differentiable activation functions.
In general, the problem of teaching a network to perform well, even on samples that were not used as training samples, is a quite subtle issue that requires additional techniques. This is especially important for cases where only very limited numbers of training samples are available.[5] The danger is that the network overfits the training data and fails to capture the true statistical process generating the data. Computational learning theory is concerned with training classifiers on a limited amount of data. In the context of neural networks a simple heuristic, called early stopping, often ensures that the network will generalize well to examples not in the training set.
Other typical problems of the back-propagation algorithm are the speed of convergence and the possibility of ending up in a local minimum of the error function. Today there are practical methods that make back-propagation in multi-layer perceptrons the tool of choice for many machine learning tasks.
One also can use a series of independent neural networks moderated by some intermediary, a similar behavior that happens in brain. These neurons can perform separably and handle a large task, and the results can be finally combined.
- This class of networks consists of multiple layers of computational units, usually interconnected in a feed-forward way. Each neuron in one layer has directed connections to the neurons of the subsequent layer. In many applications the units of these networks apply a sigmoid function as an activation function.
2015
- http://dmg.org/pmml/v4-0-1/NeuralNetwork.html#Example%20model
- QUOTE: The description of neural network models assumes that the reader has a general knowledge of artificial neural network technology. A neural network has one or more input nodes and one or more neurons. Some neurons' outputs are the output of the network. The network is defined by the neurons and their connections, aka weights. All neurons are organized into layers; the sequence of layers defines the order in which the activations are computed. All output activations for neurons in some layer L are evaluated before computation proceeds to the next layer L+1. Note that this allows for recurrent networks where outputs of neurons in layer L+i can be used as input in layer L where L+i > L. The model does not define a specific evaluation order for neurons within a layer.
2014
- (Wikipedia, 2014) ⇒ http://en.wikipedia.org/wiki/Multilayer_perceptron Retrieved:2014-8-20.
- A multilayer perceptron (MLP) is a feedforward artificial neural network model that maps sets of input data onto a set of appropriate outputs. A MLP consists of multiple layers of nodes in a directed graph, with each layer fully connected to the next one. Except for the input nodes, each node is a neuron (or processing element) with a nonlinear activation function. MLP utilizes a supervised learning technique called backpropagation for training the network. [6] [7] MLP is a modification of the standard linear perceptron and can distinguish data that are not linearly separable. [8]
- ↑ Rosenblatt, Frank. x. Principles of Neurodynamics: Perceptrons and the Theory of Brain Mechanisms. Spartan Books, Washington DC, 1961
- ↑ Rumelhart, David E., Geoffrey E. Hinton, and R. J. Williams. “Learning Internal Representations by Error Propagation". David E. Rumelhart, James L. McClelland, and the PDP research group. (editors), Parallel distributed processing: Explorations in the microstructure of cognition, Volume 1: Foundation. MIT Press, 1986.
- ↑ Cybenko, G. 1989. Approximation by superpositions of a sigmoidal function Mathematics of Control, Signals, and Systems, 2(4), 303–314.
- ↑ Hastie, Trevor. Tibshirani, Robert. Friedman, Jerome. The Elements of Statistical Learning: Data Mining, Inference, and Prediction. Springer, New York, NY, 2009.
- ↑ Roman M. Balabin; Ravilya Z. Safieva; Ekaterina I. Lomakina (2007). "Comparison of linear and nonlinear calibration models based on near infrared (NIR)
- ↑ Rosenblatt, Frank. x. Principles of Neurodynamics: Perceptrons and the Theory of Brain Mechanisms. Spartan Books, Washington DC, 1961
- ↑ Rumelhart, David E., Geoffrey E. Hinton, and R. J. Williams. “Learning Internal Representations by Error Propagation”. David E. Rumelhart, James L. McClelland, and the PDP research group. (editors), Parallel distributed processing: Explorations in the microstructure of cognition, Volume 1: Foundations. MIT Press, 1986.
- ↑ Cybenko, G. 1989. Approximation by superpositions of a sigmoidal function Mathematics of Control, Signals, and Systems, 2(4), 303–314.
2013
- http://en.wikipedia.org/wiki/Feedforward_neural_network#Multi-layer_perceptron
- This class of networks consists of multiple layers of computational units, usually interconnected in a feed-forward way. Each neuron in one layer has directed connections to the neurons of the subsequent layer. In many applications the units of these networks apply a sigmoid function as an activation function.
The universal approximation theorem for neural networks states that every continuous function that maps intervals of real numbers to some output interval of real numbers can be approximated arbitrarily closely by a multi-layer perceptron with just one hidden layer. This result holds only for restricted classes of activation functions, e.g. for the sigmoidal functions.
Multi-layer networks use a variety of learning techniques, the most popular being back-propagation. Here, the output values are compared with the correct answer to compute the value of some predefined error-function. By various techniques, the error is then fed back through the network. Using this information, the algorithm adjusts the weights of each connection in order to reduce the value of the error function by some small amount. After repeating this process for a sufficiently large number of training cycles, the network will usually converge to some state where the error of the calculations is small. In this case, one would say that the network has learned a certain target function. To adjust weights properly, one applies a general method for non-linear optimization that is called gradient descent. For this, the derivative of the error function with respect to the network weights is calculated, and the weights are then changed such that the error decreases (thus going downhill on the surface of the error function). For this reason, back-propagation can only be applied on networks with differentiable activation functions.
In general, the problem of teaching a network to perform well, even on samples that were not used as training samples, is a quite subtle issue that requires additional techniques. This is especially important for cases where only very limited numbers of training samples are available.[1] The danger is that the network overfits the training data and fails to capture the true statistical process generating the data. Computational learning theory is concerned with training classifiers on a limited amount of data. In the context of neural networks a simple heuristic, called early stopping, often ensures that the network will generalize well to examples not in the training set.
Other typical problems of the back-propagation algorithm are the speed of convergence and the possibility of ending up in a local minimum of the error function. Today there are practical solutions that make back-propagation in multi-layer perceptrons the solution of choice for many machine learning tasks.
- This class of networks consists of multiple layers of computational units, usually interconnected in a feed-forward way. Each neuron in one layer has directed connections to the neurons of the subsequent layer. In many applications the units of these networks apply a sigmoid function as an activation function.
- ↑ Roman M. Balabin, Ravilya Z. Safieva, and Ekaterina I. Lomakina (2007). "Comparison of linear and nonlinear calibration models based on near infrared (NIR) spectroscopy data for gasoline properties prediction". Chemometr Intell Lab 88 (2): 183–188. doi:10.1016/j.chemolab.2007.04.006.
.